News Story
Krishnaprasad, Cavagna begin new AFOSR collective behavior research
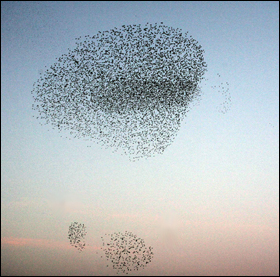
A flock of starlings exhibiting collective behavior.
Building on their separate prior contributions, Krishnaprasad and Cavagna have launched an intense program of research in natural flocks and swarms of birds and insects. The research is aimed at discerning the underlying principles, working out models and algorithms to create quantitative support for the extracted principles, and exploiting the resulting understanding, as codified in models and algorithms, in the design, implementation and verification of robust, distributed, cooperative, survivable control systems for swarms of autonomous robots.
A variety of tools from geometric and optimal control theory, statistical physics, graph theory, and large-scale data analysis coupled with empirical observations, will be brought to bear on problems of collective behavior, to elucidate the scientific foundations of the subject, and realize applications to robotics.
Published October 5, 2010
Related Stories
Stories / April 26, 2017
Flocks and Form
Stories / November 9, 2016
Small collectives and nonlinear dynamics
Stories / April 2, 2015
Optimal control and strong interactions imply flock cohesion

Stories / December 12, 2014
Workshop on Geometry of Collective Behavior organized by P. S....

Stories / August 17, 2013
Galloway, Justh, Krishnaprasad publish chasing and flocking...

Stories / July 2, 2012
Krishnaprasad awarded AFOSR DURIP for collective behavior...
Stories / May 2, 2012
Krishnaprasad delivers Princeton Baetjer Colloquium lecture
Stories / November 30, 2023
Workshop honors alum Naomi Leonard

Stories / November 29, 2023
Alum Fumin Zhang elected to IEEE Fellow
Stories / May 25, 2023
Baras, Sadler part of large ARL DataDrivER project