News Story
Alumnus Develops Autonomous Robotic Fish for Environmental Monitoring
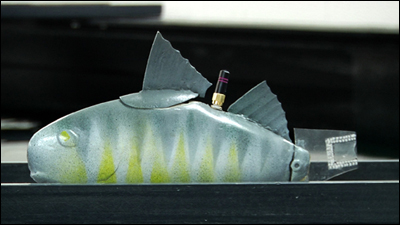
This prototype was developed in Xiaobo Tan's laboratory.
Tan is the PI and Litchman the co-PI on the three-year NSF award, titled "AquaSWARM: Small Wireless Autonomous Robots for Monitoring of Aquatic Environments."
The goal of the AquaSWARM project is to design and develop small, energy-efficient, autonomous underwater robots as sensor-rich platforms for dynamic, long-duration monitoring of aquatic environments. A novel concept of gliding robotic fish is investigated, which merges the energy-efficient design of underwater glider with the high maneuverability of robotic fish. Gliding motion, enabled by pitch and buoyancy control, is exploited to realize dive/ascent and large-distance horizontal travel. Soft actuation materials-based flexible tail fins are used to achieve maneuvers with high hydrodynamic efficiency. The research is focused on understanding gliding design for small robotic fish, and addressing the energy efficiency issue from a systems perspective. Schools of such autonomous robots are deployed in lakes at the Michigan State University Kellogg Biological Station to detect harmful algal blooms (HABs) and validate models for HAB dynamics.
The project is expected to result in cost-effective, underwater robots that can perform uninterrupted, long-duration (several months), long-travel (hundreds of miles) operation in aquatic environments. This will provide a novel, viable, versatile, cyber-physical infrastructure for aquatic environmental monitoring, with applications ranging from understanding the impact of global warming, to environmental protection, drinking water reservoir safety, and seaport security. The project also offers an interdisciplinary training environment for graduate and undergraduate students, and provides outreach opportunities to inspire pre-college students and train highly qualified teachers. Robotic fish-based HAB detection will also be used as a tool to engage communities at local lakes and stimulate their interest in novel technology and environmental issues.
This work will build on previous research Tan accomplished with an NSF CAREER Award and an award from the Office of Naval Research.
Read the Michigan State University press release
View a video of the robotic fish
View story about Tan’s previous Office of Naval Research grant in this area
Published November 5, 2009
Recent Stories
Stories / Apr 22, 2024
Khaligh Honored With Linda Clement Outstanding Advisor Award

Stories / Apr 19, 2024
Celebrating Asian, Pacific Islander, and Desi American Engineers

Stories / Apr 16, 2024
Cunxi Yu Receives NSF Medium Award

Stories / Mar 22, 2024
Dinesh Manocha Inducted into IEEE VGTC Virtual Reality Academy

Stories / Mar 21, 2024
ECE Ph.D. Student Ayooluwa (“Ayo”) Ajiboye Recognized at...

Stories / Mar 15, 2024
Fischell Institute Womxn’s History Month Spotlight: Sydney...

Stories / Mar 15, 2024
Agents of Positive Change: Highlighting Women Maryland Engineers

Stories / Mar 14, 2024
Clark School Research Nominated for “Invention of the Year”
Stories / Mar 13, 2024
Edo Waks Recipient of 2024 MURI Award

Stories / Mar 12, 2024
Resensys, Founded by ECE Alum Mehdi Kalantari (ECE Ph.D. '05),...
